About G1
Part name
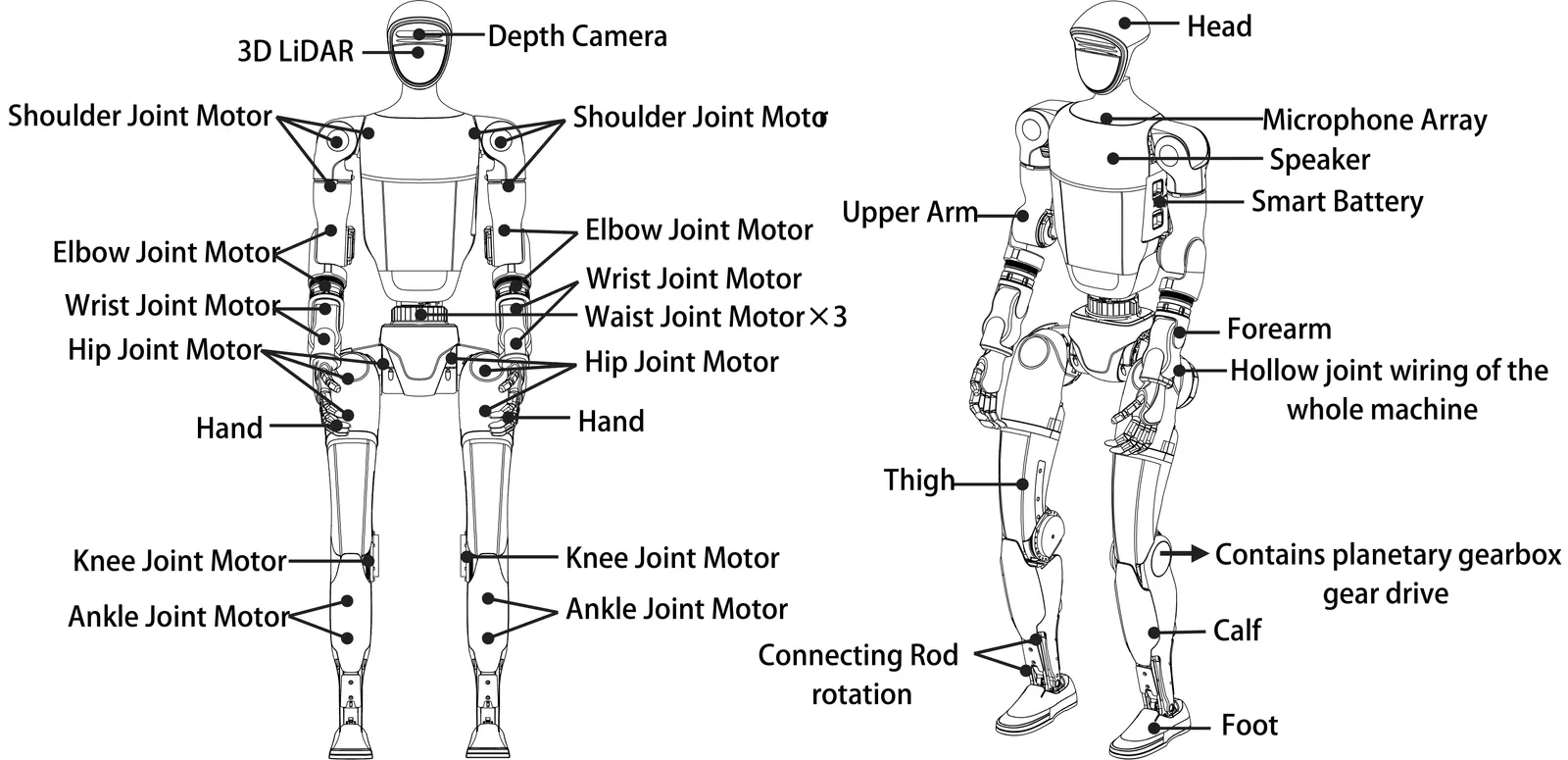
Section titled “Part name”G1 whole machine is divided into upper body and lower body, with multiple degrees of freedom. A single arm has five degrees of freedom, including the shoulder, upper arm, and elbow joints. One leg has six degrees of freedom, including the hip, leg, hip, knee, and ankle joints. The waist has 1 degree of freedom, namely the lumbar joint. According to different versions, the whole machine can be divided into G1 basic version (23 degrees of freedom), G1-EDU version (23~43 degrees of freedom), by multiple joint motor degrees of freedom, so that the robot can achieve accurate motion and attitude control.
| type |
G1 | G1-EDU |
|---|---|---|
| Total Degrees of Freedom (Joint Freedom) |
23 | 23~43 |
| Single Leg Degrees of Freedom | 6 | 6 |
| Waist Degrees of Freedom | 1 | 1+ (Optional 2 additional waist degrees of freedom) |
| Single Arm Degrees of Freedom | 5 | 5 |
| Single Hand Degrees of Freedom | / | 7(Optional Force outrolled three-fingered dexterous hand Dex3-1) +2(Optional 2 additional wrist degrees of freedom) |
| Component Description | 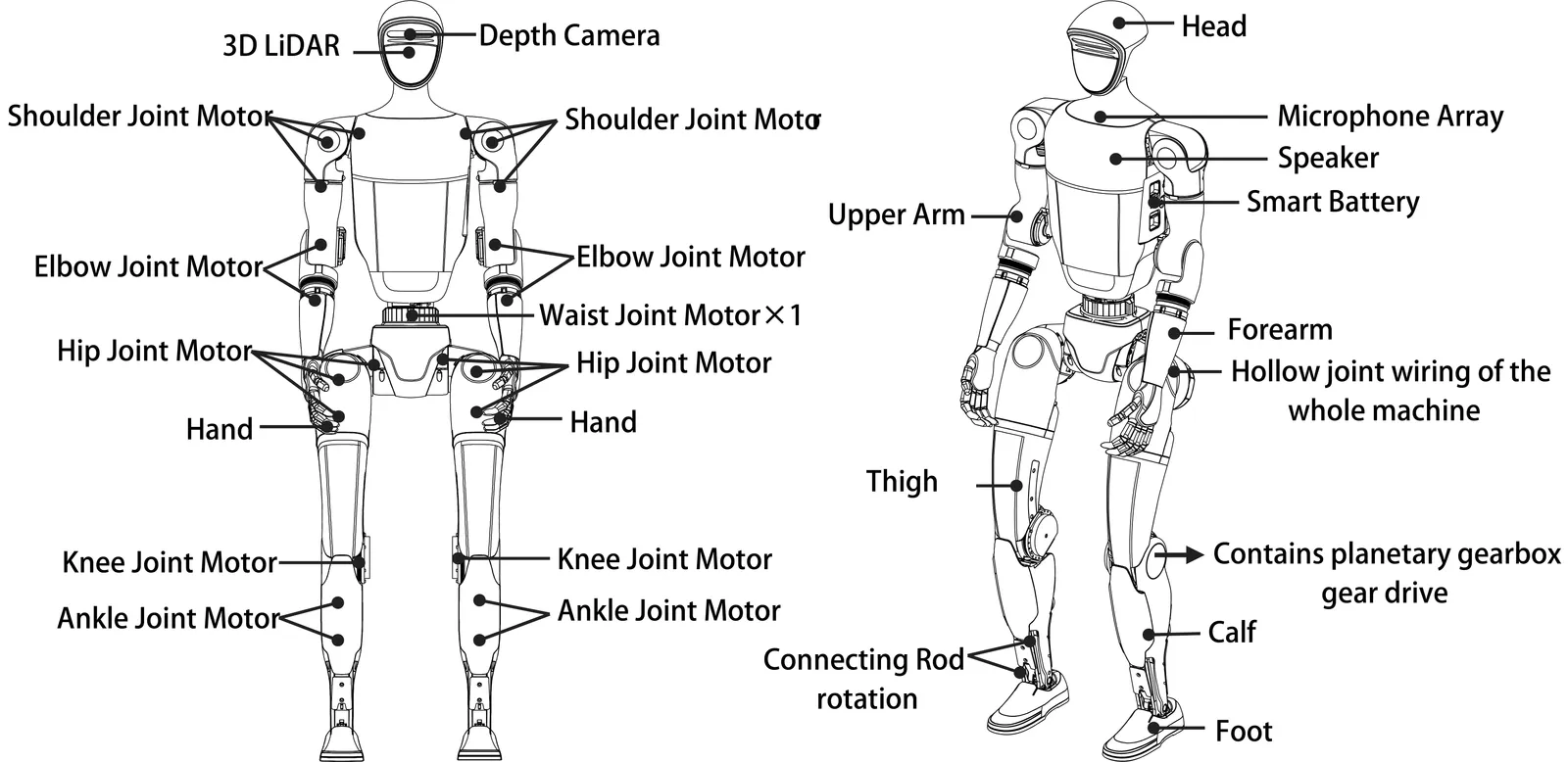 |
 |
Dex3-1
Section titled “Dex3-1”| Three-fingered dexterous hand Dex3-1 Electrical Parameter |
|
|---|---|
| Rendering image |  |
| Operating voltage | 12-58V |
| Range of Perception | 10g-2500g |
| Degrees of freedom | Total degrees of freedom: 7 1.The thumb has 3 active degrees of freedom; 2.the index finger has 2 active degrees of freedom; 3.the middle finger has 2 active degrees of freedom. |
| Angle of Joint | Thumb: 0° Index Finger and Middle Finger: 0° |
| Number of Array Sensors | 9 |
Installation hole position: unit: mm
Section titled “Installation hole position: unit: mm”If you need to use the G1 mounting hole, please remove the label on the hole first.


Electrical Interface
Section titled “Electrical Interface”The right side of the G1 is equipped with electrical interfaces, which are used to connect the various body joint motors, sensor peripherals, network ports, etc. This design makes it easy to debug, troubleshoot problems, and do secondary development.

| No. | Connector Name | Interface Description for short | Interface specification |
|---|---|---|---|
| 1 | XT30UPB-F | VBAT | 58V/5A Battery power output (directly connected to battery power here) |
| 2 | XT30UPB-F | 24V | 24V/5A power output |
| 3 | XT30UPB-F | 12V | 12V/5A power output |
| 4 | RJ45 | 1000 BASE-T | GbE(gigabit Ethernet) |
| 5 | RJ45 | 1000 BASE-T | GbE(gigabit Ethernet) |
| 6 | Type-C | Type-C | Support USB3.0 host, 5V/1.5A power output |
| 7 | Type-C | Type-C | Support USB3.0 host, 5V/1.5A power output |
| 8 | Type-C | Type-C | Support USB3.0 host, 5V/1.5A power output |
| 9 | Type-C | Alt Mode Type-C | Supports USB3.2 host and DP1.4 |
| 10 | 5577 | I/O OUT | 12V: 12V/3A power output See the following table for GPIO details |

| GPIO Number | NX Pin Number | Multiplexing Relationship | Pin name of the debugfs file system |
|---|---|---|---|
| GPIO1 | 203 | UART1_TXD | GPIO3_PR.02 |
| GPIO2 | 205 | UART1_RXD | GPIO3_PR.03 |
| GPIO3 | 232 | I2C2_SCL | GPIO3_PI.03 |
| GPIO4 | 234 | I2C2_SDA | GPIO3_PI.04 |
| GPIO5 | 128 | GPIO | GPIO3_PCC.02 |
| GPIO6 | 130 | GPIO | GPIO3_PCC.03 |
Debugging interface
Section titled “Debugging interface”
The Ethernet debugging interface of the operation control computing unit and the Ethernet debugging interface of the development computing unit are the same, and the line sequence is as follows:
| PIN | Pin Description | RJ45 Line Sequence |
|---|---|---|
| 1 | 0P | Orange and White |
| 2 | 0N | Orange |
| 3 | 1P | Green and White |
| 4 | 1N | Green |
| 5 | 2P | Blue and White |
| 6 | 2N | Blue |
| 7 | 3P | Brown White |
| 8 | 3N | Brown |
On-board computer
Section titled “On-board computer”G1-EDU onboard standard with 1 operation and control computing unit, and one development computing unit.
| parameter | development computing unit (PC 2) |
|---|---|
| Model | Jetson Orin NX |
| CPU | Arm® Cortex®-A78AE |
| Number of cores | 8 |
| Number of threads | 8 |
| Max largest rate | 2 GHz |
| graphic memory Memory | 16G |
| Memory | 16G |
| Cache | 2MB L2 + 4MB L3 |
| Storage | 2T |
| Intel ® Image Processing Unit | No |
| GPU | 1024 NVIDIA Ampere architecture Gpus with 32 Tensor cores |
| Maximum dynamic frequency of graphics card | 918MHz |
| Gaussian and Neuro Accelerator | 3.0 |
| Intel ® deep learning promotion | Yes |
| Intel ®Adaptix™ Technology | Yes |
| Intel ® hyperthreading technology | Yes |
| Instructions set | 64bit |
| OpenGL | 4.6 |
| OpenCL | 3.0 |
| DirectX | 12.1 |
| IP address | 192.168.123.164 |
- Transportation and control computing unit is dedicated to Unitree motion control program and not open to the public. Developers can only use the development computing unit for secondary development. Initial user name:
unitreepassword:123- In the table, PC2 [Development Computing Unit] has an IP address of 192.168.123.164.
- CPU modules may ship to a more advanced version with no less than the above performance.
- Unitree does not deploy services on the NVIDIA Jetson Orin module.
Field of view of G1 radar and camera
Section titled “Field of view of G1 radar and camera”The G1 head is equipped with LIVOX-MID360 laser radar, which provides excellent environmental perception capabilities for robots.Lidar adopts omnidirectional and full-angle scanning technology, with a FOV level of up to 360° and a maximum vertical angle of 59°, enabling real-time acquisition of accurate environmental data.It can quickly identify and measure surrounding objects, providing high-resolution point cloud data.


The G1 head is equipped with a D435i depth camera, which provides the robot with excellent visual perception capabilities, enabling it to more accurately perceive and understand its surroundings, achieve precise spatial perception and obstacle detection, and enable the robot to interact with the environment and respond to various scenarios more intelligently and flexibly.

Joint motor
Section titled “Joint motor”The G1 joint adopts Unitree self-developed motor, which has excellent performance and characteristics. The maximum torque of the motor is 120N.m, and the design of the hollow axis makes the motor more lightweight and compact in structure. The motor is also equipped with dual encoders to provide more accurate position and velocity feedback to meet the needs of high precision control.
Joint serial number and joint limit
Section titled “Joint serial number and joint limit”| Joint Index | Joint Name | limit(rad) |
|---|---|---|
| 0 | L_LEG_HIP_PITCH | -2.5307~2.8798 |
| 1 | L_LEG_HIP_ROLL | -0.5236~2.9671 |
| 2 | L_LEG_HIP_YAW | -2.7576~2.7576 |
| 3 | L_LEG_KNEE | -0.087267~2.8798 |
| 4 | L_LEG_ANKLE_PITCH | -0.87267~0.5236 |
| 5 | L_LEG_ANKLE_ROLL | -0.2618~0.2618 |
| 6 | R_LEG_HIP_PITCH | -2.5307~2.8798 |
| 7 | R_LEG_HIP_ROLL | -2.9671~0.5236 |
| 8 | R_LEG_HIP_YAW | -2.7576~2.7576 |
| 9 | R_LEG_KNEE | -0.087267~2.8798 |
| 10 | R_LEG_ANKLE_PITCH | -0.87267~0.5236 |
| 11 | R_LEG_ANKLE_ROLL | -0.2618~0.2618 |
| 12 | WAIST_YAW | -2.618~2.618 |
| 13 | WAIST_ROLL | -0.52~0.52 |
| 14 | WAIST_PITCH | -0.52~0.52 |
| 15 | L_SHOULDER_PITCH | -3.0892~2.6704 |
| 16 | L_SHOULDER_ROLL | -1.5882~2.2515 |
| 17 | L_SHOULDER_YAW | -2.618~2.618 |
| 18 | L_ELBOW | -1.0472~2.0944 |
| 19 | L_WRIST_ROLL | -1.972222054~1.972222054 |
| 20 | L_WRIST_PITCH | -1.614429558~1.614429558 |
| 21 | L_WRIST_YAW | -1.614429558~1.614429558 |
| 22 | R_SHOULDER_PITCH | -3.0892~2.6704 |
| 23 | R_SHOULDER_ROLL | -2.2515~1.5882 |
| 24 | R_SHOULDER_YAW | -2.618~2.618 |
| 25 | R_ELBOW | -1.0472~2.0944 |
| 26 | R_WRIST_ROLL | -1.972222054~1.972222054 |
| 27 | R_WRIST_PITCH | -1.614429558~1.614429558 |
| 28 | R_WRIST_YAW | -1.614429558~1.614429558 |
Coordinate system, joint rotation axis and joint zero point
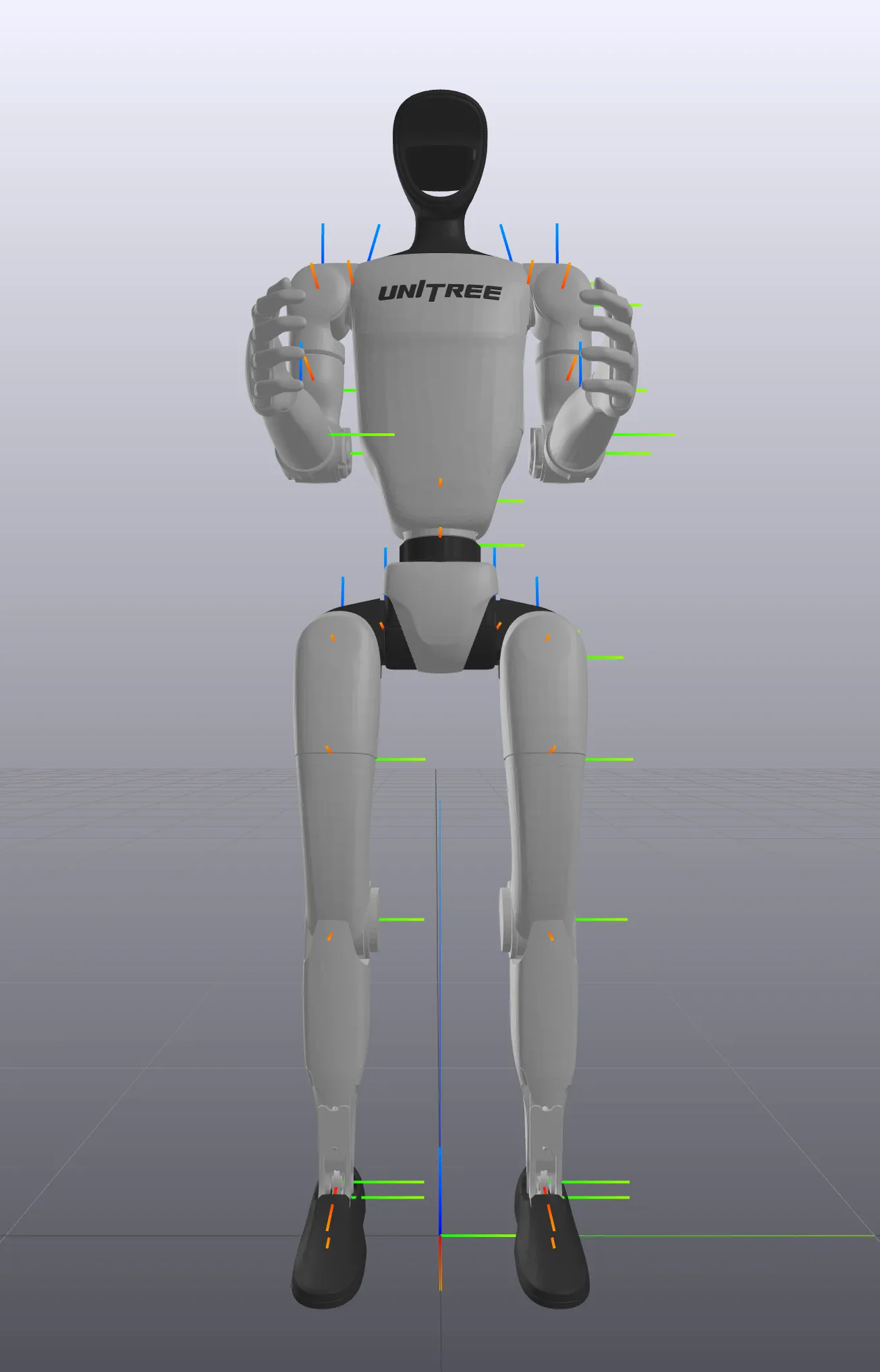
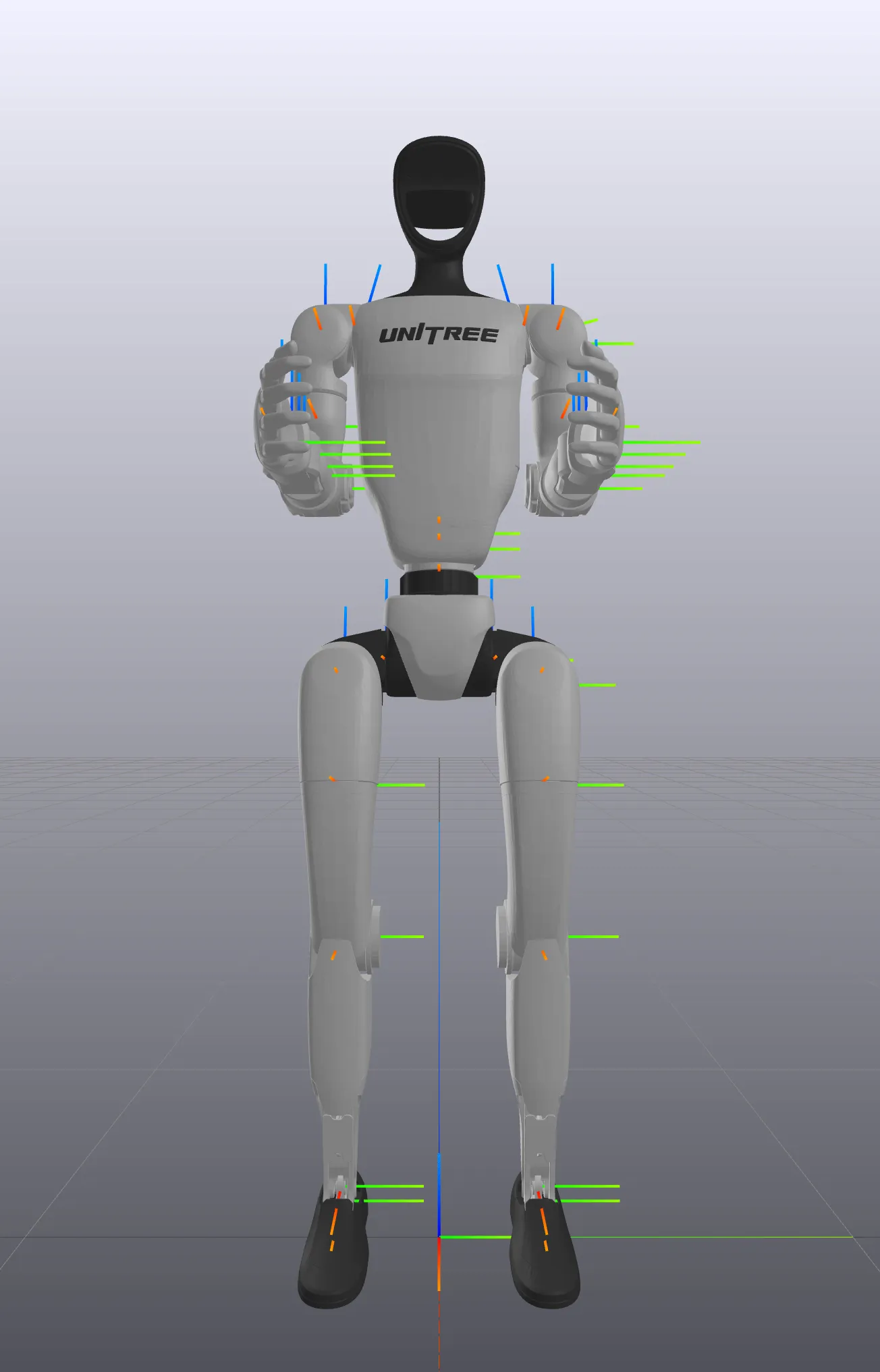
Section titled “Coordinate system, joint rotation axis and joint zero point”When all joints are zero, each coordinate system is as follows. Red is the X-axis, green is the Y-axis, and blue is the z-axis.
| 23 dof | 29dof |
|---|---|
 |
 |
Robot specifications
Section titled “Robot specifications”| model |
G1 | G1-EDU |
|---|---|---|
| Height, Width and Thickness (Stand) | 1320x450x200mm | 1320x450x200mm |
| Height, Width and Thickness (Fold) | 690x450x300mm | 690x450x300mm |
| Weight (With Battery) | About 35kg | About 35kg |
| Total Degrees of Freedom (Joint Freedom) | 23 | 23~43 |
| Single Leg Degrees of Freedom | 6 | 6 |
| Waist Degrees of Freedom | 1 | 1+ (Optional 2 additional waist degrees of freedom) |
| Single Arm Degrees of Freedom | 5 | 5 |
| Single Hand Degrees of Freedom | / | 7(Optional Force control of three-fingered hand)+2(Optional 2 additional wrist degrees of freedom) |
| Joint output bearing | Industrial grade crossed roller bearings (high precision, high load capacity) | Industrial grade crossed roller bearings (high precision, high load capacity) |
| Joint motor | Low inertia high-speed internal rotor PMSM(permanent magnet synchronous motor,better response speed and heat dissipation) | Low inertia high-speed internal rotor PMSM(permanent magnet synchronous motor,better response speed and heat dissipation) |
| Maximum Torque of Knee Joint[1] | 90N.m | 120N.m |
| Arm Maximum Load[2] | About 2Kg | About 3Kg |
| Calf + Thigh Length | 0.6M | 0.6M |
| Arm Span | About 0.45M | About.45M |
| Extra Large Joint Movement Space | Waist joint:Z±155° Knee joint:0 Hip joint:P±154°、R-30 |
Waist joint:Z±155°、X±45°、Y±30° Knee joint:0 Hip joint:P±154°、R-30 Wrist joint:P±92.5°、Y±92.5° |
| Full Joint Hollow Electrical Routing | YES | YES |
| Joint Encode | Dual encoder | Dual encoder |
| Cooling System | Local air cooling | Local air cooling |
| Power Supply | 13 string lithium battery | 13 string lithium battery |
| Basic Computing Power | 8-core high-performance CPU | 8-core high-performance CPU |
| Sensing Sensor | Depth Camera+3D LiDAR | Depth Camera+3D LiDAR |
| 4 Microphone Array | YES | YES |
| 5W Speaker | YES | YES |
| WiFi 6 、Bluetooth 5.2 | YES | YES |
| High Computing Power Module | / | NVIDIA Jetson Orin |
| Smart Battery (Quick Release) | 9000mAh | 9000mAh |
| Charger | 54V 5A | 54V 5A |
| Manual Controller | YES | YES |
| Battery Life | About 2h | About 2h |
| Upgraded Intelligent OTA | YES | YES |
| Secondary Development[3] | / | YES |
Thor Backpack Specifications
Section titled “Thor Backpack Specifications”
| Attribute | Specification |
|---|---|
| Core Module | Jetson T5000 |
| Core Performance (FP4) | 2070 TFLOPS |
| GPU | 2560-core NVIDIA Blackwell architecture GPU, equipped with 96 fifth-gen Tensor Cores |
| CPU | 14-core Arm® Neoverse®-V3AE 64-bit CPU |
| Unified Memory | 128GB 256-bit LPDDR5X |
| Storage | 1TB |
| Peak Power Consumption | 130W |
| USB Port Configuration | Type-A 3.2 * 2 Type-C 3.1 *2 |
| Operating System | Jetson Linux 38.2.1 (Ubuntu-based) |
| Jetpack | Jetpack 7 |