Dex3-1 Dexterous Hand
Introduction to Dexterous Hands
Section titled “Introduction to Dexterous Hands”The G1 can be optionally equipped with Unitree’s self-developed Dex3-1 force-controlled dexterous hand. This dexterous hand has 3 fingers, with 2 bending degrees of freedom for each, and an additional rotational degree of freedom for the thumb, totaling 7 degrees of freedom.
The dexterous hand can be optionally equipped with tactile sensor arrays, with a 3x4 array sensor at each fingertip position (6 locations in total).
This document only covers how to control the G1’s dexterous hand through unitree_sdk2, with demo programs attached at the end showing examples of obtaining hand status information and control functions.
The dexterous hands are distinguished between left and right hands. Each Dex3-1 dexterous hand is left-right symmetric. When controlling the dexterous hands, communication is conducted through different message channels to control the corresponding hand. See the dexterous hand control methods section for details.

You can access unitree_sdk2 from here, and see Quick Development for operation instructions. The source code for this chapter’s examples is located in GitHub.
Technical parameters
Section titled “Technical parameters”| Model | Control interface | Degree of freedom | Rated voltage |
|---|---|---|---|
| Dex3-1 | RS485 | 7 | 24V |
Dexterous hand control method
Section titled “Dexterous hand control method”G1 internally provides a resident service program that communicates with Dex3-1 and converts to DDS messages. This service receives and processes user requests.
After obtaining unitree_sdk2, the system will load the message structure library. Users can control the corresponding dexterous hand by correctly using the message structures and communicating with the corresponding interfaces.
The dexterous hand header files are located at:
/usr/local/include/unitree/hg_idl/HandState_.hpp
/usr/local/include/unitree/hg_idl/HandCmd_.hpp
Users can check the structure information in these files.
Sort by message structure
Section titled “Sort by message structure”According to the message structure ordering, the fingers are defined as thumb, index finger, and middle finger based on human perception, and arranged in sequence.
The unitree_hg::msg::dds_::HandCmd_.motor_cmd and unitree_hg::msg::dds_::HandState_.motor_state message structures contain information for all dexterous hand motors, with the following motor order:
| Hand Joint Index in IDL | Hand Joint Name |
|---|---|
| 0 | thumb_0 |
| 1 | thumb_1 |
| 2 | thumb_2 |
| 3 | middle_0 |
| 4 | middle_1 |
| 5 | index_0 |
| 6 | index_1 |
Sort by URDF
Section titled “Sort by URDF”Since the URDF version of the dexterous hand generates position information in the same coordinate system, there are slight differences between left and right hands. The URDF can be obtained from the open-source platform.
Left hand 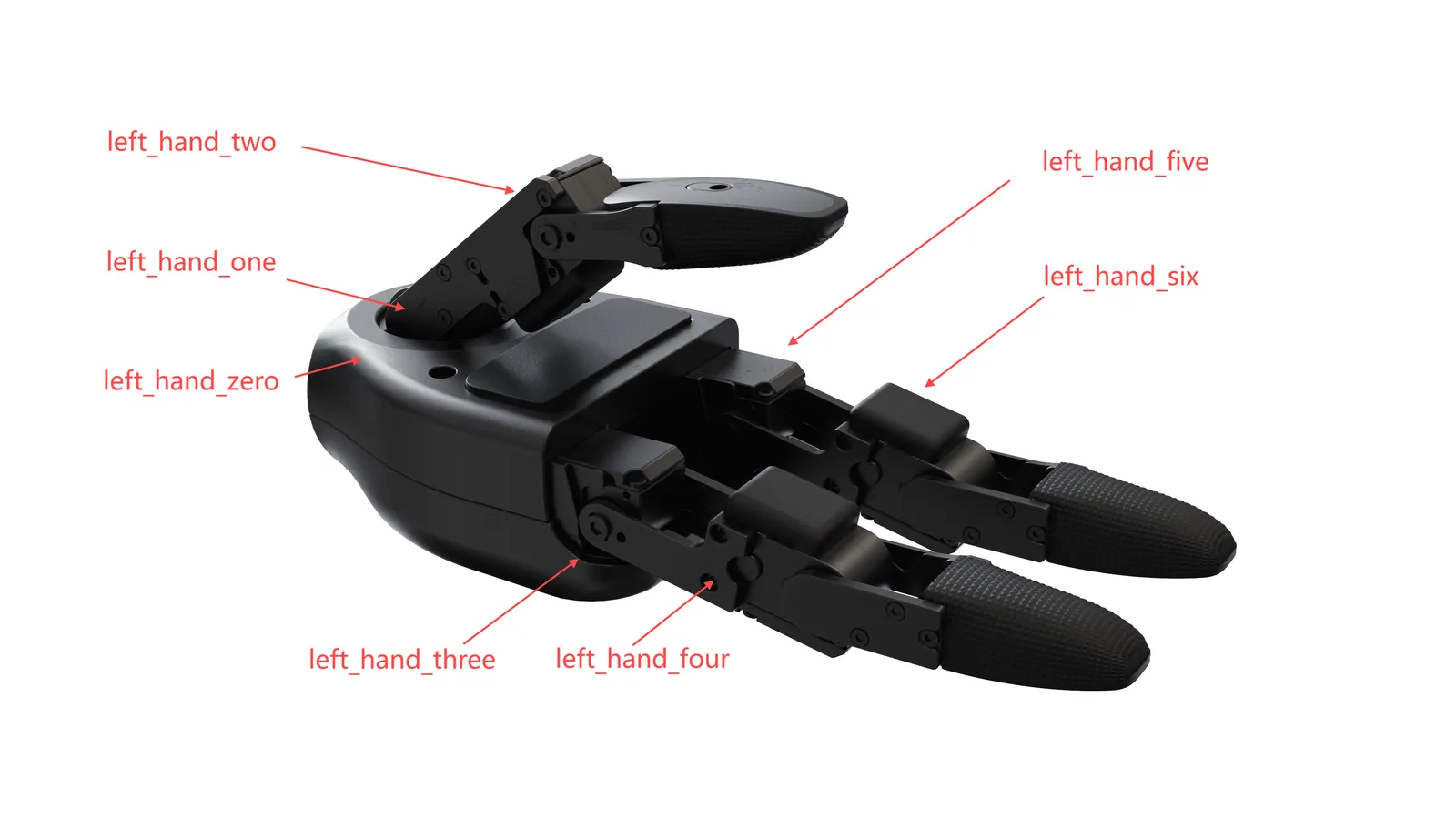
| Hand Joint Index in URDF | Hand Joint Index in IDL | Hand Joint Name | |
|---|---|---|---|
| left_hand_zero | 0 | thumb_0 | |
| left_hand_one | 1 | thumb_1 | |
| left_hand_two | 2 | thumb_2 | |
| left_hand_five | 3 | middle_0 | |
| left_hand_six | 4 | middle_1 | |
| left_hand_three | 5 | index_0 | |
| left_hand_four | 6 | index_1 |
Right hand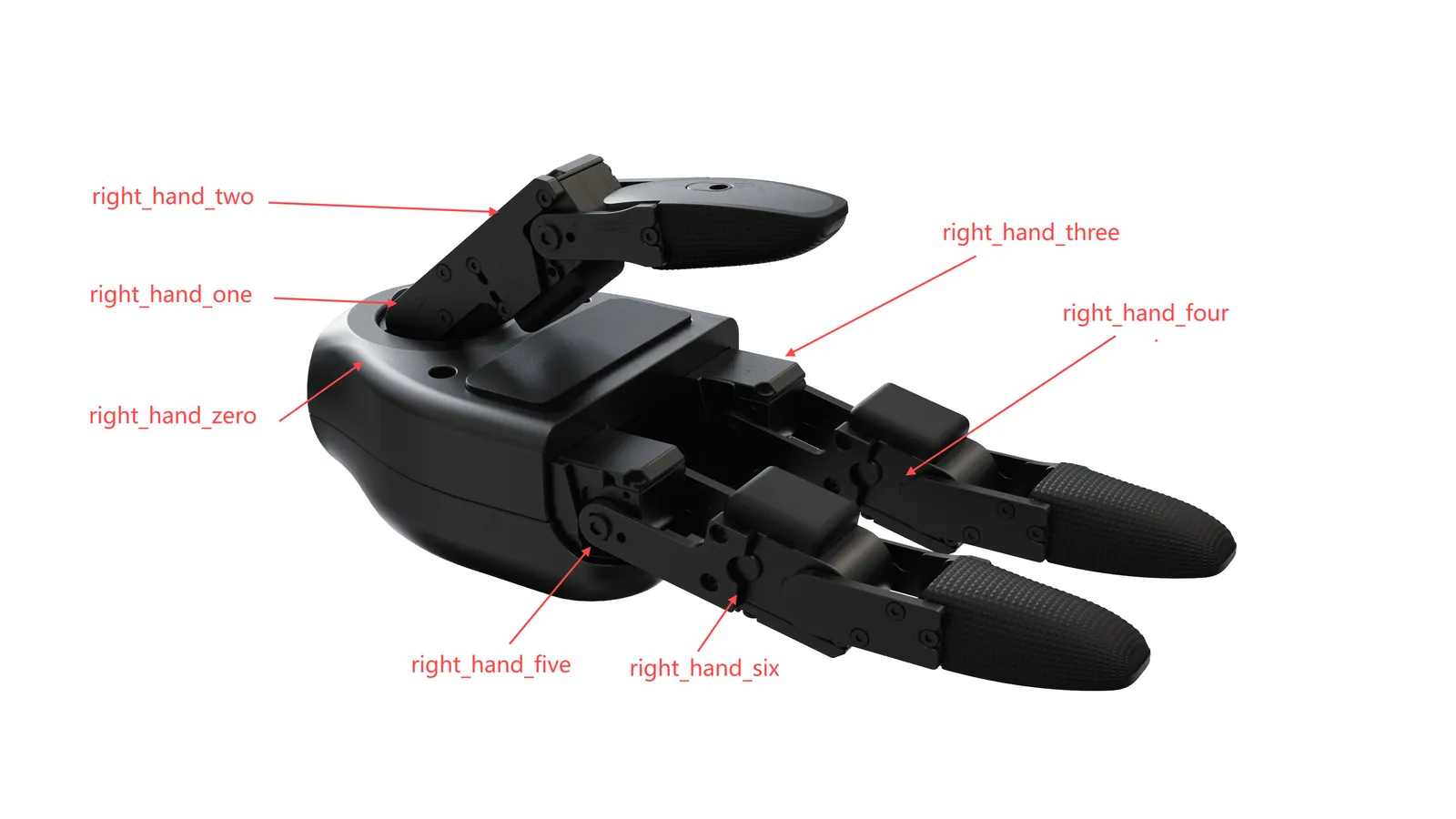
| Hand Joint Index in URDF | Hand Joint Index in IDL | Hand Joint Name |
|---|---|---|
| right_hand_zero | 0 | thumb_0 |
| right_hand_one | 1 | thumb_1 |
| right_hand_two | 2 | thumb_2 |
| right_hand_three | 3 | middle_0 |
| right_hand_four | 4 | middle_1 |
| right_hand_five | 5 | index_0 |
| right_hand_six | 6 | index_1 |
Interface Description
Section titled “Interface Description”Users can control the dexterous hand by sending unitree_hg::msg::dds_::HandCmd_ messages to the topic “rt/dex3/(left or right)/cmd”. To receive the dexterous hand status, subscribe to the topic “rt/dex3/(left or right)/state” for unitree_hg::msg::dds_::HandState_ messages.
IDL Data Format:
Section titled “IDL Data Format:”Below are the control and status structures used in this communication:
Control structure HandCmd_:
struct HandCmd_ { sequence<unitree_hg::msg::dds_::MotorCmd_> motor_cmd; unsigned long reserve[4];};//struct HandCmd_MotorCmd_ structure:
typedef struct { // Motor control command data packet 20 bytes uint8_t head[2]; // Header 0xFE 0xEE participates in CRC RIS_Mode_t mode; // Motor control mode 1Byte uint8_t res; // Reserved int16_t tor_des; // Desired joint output torque 256 represents 1mNM int16_t spd_des; // Desired joint output speed 256/2π represents 100rad/s int32_t pos_des; // Desired joint output position 32768/2π represents 1rad int16_t k_pos; // Desired joint stiffness coefficient 1280 represents 1mN.m/rad int16_t k_spd; // Desired joint damping coefficient 1280 represents 1mN.m/100rad/s uint32_t CRC32; // CRC32} MotorCmd_t;
RIS_Mode_t structure:```cpptypedef struct { uint8_t id : 4; // Motor ID: 0,1...,13,14 15 represents broadcasting to all motors uint8_t status : 3; // Working mode: 0.Lock 1.FOC 6 uint8_t timeout: 1; // Master->Motor: 0.Disable timeout protection 1.Enable (Default 1s timeout) // Motor->Master: 0.No timeout 1.Timeout protection triggered (needs control bit 0 to clear)} RIS_Mode_t; // Control mode 1ByteStatus structure HandState_:
struct HandState_ { sequence<unitree_hg::msg::dds_::MotorState_> motor_state; sequence<unitree_hg::msg::dds_::PressSensorState_> press_sensor_state; unitree_hg::msg::dds_::IMUState_ imu_state; float power_v; float power_a; float system_v; float device_v; unsigned long error[2]; unsigned long reserve[2];};For details about data filling rules in structures like HandState_, IMUState_, and MotorState_, please refer to the H-2 Basic Services Interface chapter in the H1 SDK Development Guide. The PressSensorState_ structure will be explained below.
The fields in the status structure represent the following:
power_v: Total input power supply voltage for the dexterous hand power_a: Total input power supply current for the dexterous hand system_v: Internal power supply voltage of the dexterous hand device_v: Output voltage of the voltage step-down module in the dexterous hand error: Error code output by the dexterous hand. For detailed error code definitions, please refer to the Motor Status Error Information section in the G1 SDK documentation reserve: Reserved fields for future use
PressSensorState structure:
struct PressSensorState { unsigned short data[12]; // 12 tactile sensor values unsigned char id; // finger ID unsigned char temp; // temperature unsigned short reserve[2]; // reserved};//struct PressSensorStateThe pressure value for a single sensor:

 The ID in the figure represents a PressSensorState_ sensor data packet. The sensor positions corresponding to the pressure[12] data indices are marked in the figure.
Sensor data values:
The ID in the figure represents a PressSensorState_ sensor data packet. The sensor positions corresponding to the pressure[12] data indices are marked in the figure.
Sensor data values:
Valid values: when data >= 100000 (10w) Invalid/No value: when data = 30000 (3w) Note: It is recommended to scale down 100000 to 10.0000 for display and calculation purposes. The temperature field represents the temperature value of the sensor.
CPP Control Interface Function Examples:
Section titled “CPP Control Interface Function Examples:”Motor Rotation Examples:
Section titled “Motor Rotation Examples:”rotateMotors Demo
void rotateMotors(bool isLeftHand) { static int _count = 1; // Counter for hand movement static int dir = 1; // Control grip direction const float* maxTorqueLimits = isLeftHand ? maxTorqueLimits_left : maxTorqueLimits_right; const float* minTorqueLimits = isLeftHand ? minTorqueLimits_left : minTorqueLimits_right;
for (int i = 0; i < MOTOR_MAX; i++) { RIS_Mode_t ris_mode; ris_mode.id = i; // Set id ris_mode.status = 0x01; // Set status to 0x01 ris_mode.timeout = 0x01; // Set timeout to 0x01
uint8_t mode = 0; mode |= (ris_mode.id & 0x0F); // Get lower 4 bits of id mode |= (ris_mode.status & 0x07) << 4; // Get upper 3 bits of status and shift left 4 bits mode |= (ris_mode.timeout & 0x01) << 7; // Get upper 1 bit of timeout and shift left 7 bits msg.motor_cmd()[i].mode(mode); msg.motor_cmd()[i].tau(0); msg.motor_cmd()[i].kp(0.5); // Set control gain kp msg.motor_cmd()[i].kd(0.1); // Set control gain kd
// Calculate target position q float range = maxTorqueLimits[i] - minTorqueLimits[i]; // Limit range float mid = (maxTorqueLimits[i] + minTorqueLimits[i]) / 2.0; // Middle value float amplitude = range / 2.0; // Amplitude
// Use _count to dynamically adjust q value float q = mid + amplitude * sin(_count / 20000.0 * M_PI); // Generate time-varying sine wave
// if(i == 0)std::cout << q << std::endl; msg.motor_cmd()[i].q(q); // Set target position q }
handcmd_publisher->Write(msg); _count += dir;
// Control grip direction if (_count >= 10000) { dir = -1; } if (_count <= -10000) { dir = 1; }
usleep(100); // Control loop frequency, avoid sending commands too quickly}Grip hand
Section titled “Grip hand”gripHand Demo
void gripHand(bool isLeftHand) { // Define limits for left and right hand const float* maxTorqueLimits = isLeftHand ? maxTorqueLimits_left : maxTorqueLimits_right; const float* minTorqueLimits = isLeftHand ? minTorqueLimits_left : minTorqueLimits_right;
for (int i = 0; i < MOTOR_MAX; i++) { RIS_Mode_t ris_mode; ris_mode.id = i; // Set id ris_mode.status = 0x01; // Set status to 0x01 ris_mode.timeout = 0; // Set timeout to 0x01
uint8_t mode = 0; mode |= (ris_mode.id & 0x0F); // Get lower 4 bits of id mode |= (ris_mode.status & 0x07) << 4; // Get upper 3 bits of status and shift left 4 bits mode |= (ris_mode.timeout & 0x01) << 7; // Get upper 1 bit of timeout and shift left 7 bits msg.motor_cmd()[i].mode(mode); msg.motor_cmd()[i].tau(0);
// Calculate middle position float mid = (maxTorqueLimits[i] + minTorqueLimits[i]) / 2.0; // Middle value
// Set motor commands msg.motor_cmd()[i].q(mid); // Set target position to middle value msg.motor_cmd()[i].dq(0); // Set velocity to 0 msg.motor_cmd()[i].kp(1.5); // Set control gain kp msg.motor_cmd()[i].kd(0.1); // Set control gain kd } msg.reserve()[0] = 0; // Publish command handcmd_publisher->Write(msg); usleep(1000000); // Send command once per second}StopMotors
Section titled “StopMotors”stopMotors Demo
void stopMotors() { for (int i = 0; i < MOTOR_MAX; i++) { RIS_Mode_t ris_mode; ris_mode.id = i; // Set id ris_mode.status = 0x01; // Set status to 0x06 ris_mode.timeout = 0x01; // Set timeout to 0x01
uint8_t mode = 0; mode |= (ris_mode.id & 0x0F); // Get lower 4 bits of id mode |= (ris_mode.status & 0x07) << 4; // Get upper 3 bits of status and shift left 4 bits mode |= (ris_mode.timeout & 0x01) << 7; // Get upper 1 bit of timeout and shift left 7 bits msg.motor_cmd()[i].mode(mode); msg.motor_cmd()[i].tau(0); msg.motor_cmd()[i].dq(0); msg.motor_cmd()[i].kp(0); msg.motor_cmd()[i].kd(0); msg.motor_cmd()[i].q(0); // Stop all motors
} handcmd_publisher->Write(msg); usleep(1000000); // Send stop command once per second}Print Motor State
Section titled “Print Motor State”printState Demo
void printState(bool isLeftHand){ Eigen::Matrix<float, 7, 1> q; // Define limits for left and right hand const float* maxTorqueLimits = isLeftHand ? maxTorqueLimits_left : maxTorqueLimits_right; const float* minTorqueLimits = isLeftHand ? minTorqueLimits_left : minTorqueLimits_right; for(int i = 0; i < 7; i++) { q(i) = state.motor_state()[i].q(); // Normalize q to [0, 1] q(i) = (q(i) - minTorqueLimits[i] ) / (maxTorqueLimits[i] - minTorqueLimits[i]); q(i) = std::clamp(q(i), 0.0f, 1.0f); } if(isLeftHand){ std::cout << " L: " << q.transpose() << std::endl; }else std::cout << " R: " << q.transpose() << std::endl; usleep(0.1 * 1e6);}